3D Graphics Explanation¶
This is a short introduction to 3D graphics from the perspective of pi3d, there will be gaps and possibly misapprehensions but it should give you a reasonable feeling for how things work! Also I intentionally skip over many of the more involved aspects such as rendering to off-screen buffers, using masks, etc.
Beneath the python module classes and functions provided by pi3d there are three “steps” necessary for control of the GPU. Two or three of these require external libraries (shared objects in linux, dlls in windows) to be imported [1]:
1. on the Raspberry Pi libbcm_host.so is used to create and manage a display surface to draw on. On linux (desktop and laptop) the surface is provided by the x11 server [2] and windows and Android use pygame (which uses SDL2 [3])
2. libELG is used to set up the interface between the machine or operating system window system and
3. libGLESv2 provides access to the OpenGL language functions developed to standardise utilisation of graphics cards. Mobile devices, including the Raspberry pi use a slightly cut-down version called OpenGL ES, specifically version 2.0.
From OpenGL ESv2.0 onwards the fundamental graphics donkey work is done by ‘shaders’ that are defined by the developer and compiled as the program runs rather than being ‘built into’ the GPU. This opens up a fantastic range of possibilities but there are some fundamental limits that may not be immediately apparent.
Communication between python and the GPU¶
There are two parts to a shader: the vertex shader and the fragment (essentially pixel) shader which are written in a C like language (GLSL). I will give some more detail to what each actually does later but one crucial thing to appreciate is that information is passed from the CPU program (in our case python pi3d ones) to the shaders and the vertex shader can pass information on to the fragment shader, however the only output is pixels [4]. It is fundamental to the efficiency and speed of the GPU that the shaders operate on only one vertex or pixel. i.e. the vertex shader can’t access information about the location of adjacent vertices and the fragment shader can’t determine the colour, say, of adjacent pixels. This allows the processing to be run in parallel (massively parallel, some GPU have thousands of processing cores) but means that some operation such as blurring or edge detection have to be done as a double pass process.
Information needed to render the scene is passed to the shader in four distinct blocks:
An ‘element array’ that will be drawn by the call to the drawElements function. This function can be used to draw polygons (limited to triangles in OpenGL ES2.0), lines or points, and the type of drawing will determine how the entries in the array are interpreted. Essentially each element will contain reference indices to one or more vertices. In the simple square example below this is the triangle indices array.
An ‘attribute array’ of vertex information, again the type of drawing determining how much information needs to be passed. For the most general 3D drawing in pi3d the array contains vertex x,y,z values, normal vectors and texture coordinates.
‘uniform’ variables. This includes things that apply to all the vertices being drawn, such as the transformation matrix (for the shape to which the vertices belong), the projection matrix to represent camera location and field of view, the location and colour of light sources, fog properties, material shades and transparency, variables to control pattern repeats or for moving patterns etc.
A very significant part of the uniform variables are images or texture samplers to ‘clothe’ the object or to provide information on bumps or reflections.
The program for the GPU to run, comprising the vertex and fragment shader.
In pi3d these four categories of information are held in various objects: The element and attribute arrays are part of the Buffer and the Shader class contains the shader programs. However the uniform variables are held in Buffer, Shape, Camera, Light and Texture objects as seemed logical and appropriate. General window information, EGL and OpenGL functionality are held in pi3d globals or the Display object.
NB other 3D graphics frameworks pass essentially identical information to the GPU but use different terminology. So in threejs there are: Scene, PerspectiveCamera, WebGLRenderer, Mesh, Geometry, Material etc.
Sequence of events¶
3D objects are defined for use in graphics programs starting with a list of points or vertices in space each one needing x, y, z coordinates. Although not generally essential, in pi3d each vertex has a normal vector defined as well. This is effectively an arrow at right angles to the surface at that point and it also needs three values to define its magnitude in the x, y, z directions. The normal vector can be used by the shader to work out how light would illuminate a surface or how reflections would appear. If the normals at each corner of a triangular face are all pointing in the same direction then the fragment shader will treat the surface as flat, but if they are in different directions the surface will appear to blend smoothly from one direction to another. 3D models created in applications such as blender normally have an option to set faces to look either angular or smoothed by calculating different types of normal vectors. Each vertex also has two texture coordinates. These are often termed the u, v position from a two dimensional texture that is to be mapped to that vertex. Again the fragment shader can interpolate points on a surface between vertices and look up what part of a texture to render at each pixel. The crucial piece of information needed by the shader is to define which vertices to use for the corners of each triangle or element. So if I use as an example a very simple one sided square this could be defined by the attribute array:
""" vertices | normals | texture
| | coords
x y z | x y z | u v
"""
attribute_array = numpy.array(
[[0.0, 0.0, 0.0, 0.0, 0.0,-1.0, 0.0, 0.0], # 0
[0.0, 1.0, 0.0, 0.0, 0.0,-1.0, 0.0, 1.0], # 1
[1.0, 1.0, 0.0, 0.0, 0.0,-1.0, 1.0, 1.0], # 2
[1.0, 0.0, 0.0, 0.0, 0.0,-1.0, 1.0, 0.0]]) # 3
and the element array of triangle indices. Note the order of corners is important. Each triangle ‘faces’ towards a view where the sequence is clock-wise. Normally the backs of faces are not rendered by the GPU:
element_array = numpy.array(
[[0, 1, 2],
[0, 2, 3]])
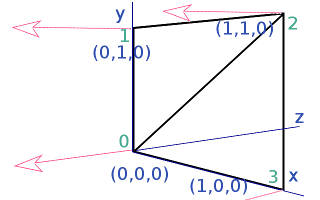
The GPU uses coordinate directions x increases from left to right, y increases from bottom to top, z increases going into the screen.
The GPU has been designed to be fantastically efficient at performing vector and matrix arithmetic. So rather than the CPU calculating where the vertices have moved and how these positions can be represented on the 2D computer screen it simply calculates a transformation matrix to represent this and passes that to the GPU. In pi3d we pass two matrices, one representing the object translation, rotation and scale and an additional one including the camera movement and perspective calculations [5]. In the vertex shader these matrices are used to convert the raw vertex positions to screen locations and to work out where the light should come from in order to work out shadows.
Image files are converted into texture arrays that are accessed very efficiently by the GPU.
When pi3d.Buffer.draw() method is called for a 3D object the python side of the program sets the shader and necessary uniform variables to draw the given object. It then works out the 4x4 matrix combining translation, rotation, scale for the object and an additional matrix incorporating the camera movement and lens settings. The camera has two basic modes for handling perspective, the default is ‘normal’ where things further away are represented as smaller on the screen and the this is defined by a viewing angle between the top edge of the screen and bottom edge. If the camera is set to orthographic mode then objects do not get smaller in the distance and one unit of object dimension corresponds to a pixel on the screen. An orthographic camera can be used to do fast 2D drawing.
The glDrawElements function is then called which sets the vertex shader to work out the locations of each vertex, normal, lighting, texture in terms of screen coordinates. The vertex shader then passes the relevant information to the fragment shader which calculates what colour and alpha value to use for each pixel. The fragment shader takes into account the depth value of each pixel and doesn’t draw anything that is behind something it has already drawn. This means that it is more efficient to draw opaque objects from near to far but if something is partially transparent then is must be drawn after anything further away that should ‘show through’.
pi3d uses a double buffer system where everything is drawn onto an off-screen buffer which, when complete at the end of the frame loop, is swapped ‘instantaneously’ to visible. This makes the animation much smoother
| [1] | The attempt to work out on what platform pi3d is running and what libraries to import is done in /pi3d/constants/__init__.py and the Initialization is done in /pi3d/utils/DisplayOpenGL.py |
| [2] | X11 is the standard windowing and user-input system used on Linux systems |
| [3] | Simple DirectMedia Layer https://www.libsdl.org/index.php |
| [4] | It is possible to get ‘output’ from GPUs using sophisticated techniques that allow the parallel processing capabilities to be used elsewhere, but this is not trivial! |
| [5] | There are actually three 4x4 matrices, the last of which is used for creating a “distance map” for calculating shadow casting (see the CastShadows.py and TigerShadow.py demos) Quite a technical procedure. |